AStar.hpp File Reference
#include "Server/Zone/Game/Map/Coordinates.hpp"#include "Server/Zone/Game/Map/Grid/GridDefinitions.hpp"#include "Server/Common/Configuration/Horizon.hpp"#include <cmath>#include <memory>#include <functional>#include <vector> Include dependency graph for AStar.hpp:
Include dependency graph for AStar.hpp: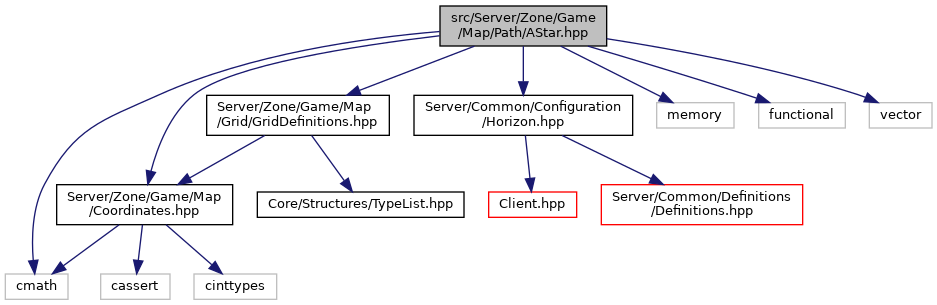 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | Horizon::Zone::AStar::Heuristic |
| struct | Horizon::Zone::AStar::Node |
| class | Horizon::Zone::AStar::Generator |
Namespaces | |
| namespace | Horizon |
| namespace | Horizon::Zone |
| namespace | Horizon::Zone::AStar |
Typedefs | |
| typedef std::function< uint32_t(MapCoords, MapCoords)> | Horizon::Zone::AStar::HeuristicFunction |
| typedef std::vector< MapCoords > | Horizon::Zone::AStar::CoordinateList |
| We use a vector because the AStar algorithm is only searching on small datasets. Other data structures such as a priority queue can be used for larger datasets. More... | |
| typedef std::function< bool(uint16_t x, uint16_t y)> | Horizon::Zone::AStar::CollisionDetectionFunction |
| using | Horizon::Zone::AStar::NodeSet = std::vector< std::shared_ptr< Node > > |