Horizon::System::RuntimeContext::WorkQueueManager Class Reference
#include <System.hpp>
 Collaboration diagram for Horizon::System::RuntimeContext::WorkQueueManager:
Collaboration diagram for Horizon::System::RuntimeContext::WorkQueueManager:
Public Member Functions | |
| WorkQueueManager (WorkControlAgent &control_agent) | |
| void | push (std::shared_ptr< WorkContext > seg) |
| std::shared_ptr< WorkContext > | pop () |
| bool | process () |
| bool | is_paused () |
Public Attributes | |
| WorkControlAgent & | _control_agent |
| boost::lockfree::spsc_queue< std::shared_ptr< WorkContext >, boost::lockfree::capacity< 100 > > | _queue |
| std::atomic< bool > | _paused {false} |
Constructor & Destructor Documentation
◆ WorkQueueManager()
|
inline |
230: _control_agent(control_agent) { }
WorkControlAgent & _control_agent
Definition: System.hpp:285
Member Function Documentation
◆ is_paused()
|
inline |
std::atomic< bool > _paused
Definition: System.hpp:287
References _paused.
◆ pop()
|
inline |
234 {
236 return nullptr;
237
238 std::shared_ptr<WorkContext> ret;
239 _queue.pop(ret);
240 return ret;
241 }
boost::lockfree::spsc_queue< std::shared_ptr< WorkContext >, boost::lockfree::capacity< 100 > > _queue
Definition: System.hpp:286
References _queue.
Referenced by Horizon::System::RuntimeContext::pop(), and process().
Here is the caller graph for this function:
◆ process()
|
inline |
244 {
245 std::shared_ptr<WorkContext> context = nullptr;
246
247 //_control_agent.start();
248
249 bool failed = false;
250
252 while (_control_agent.get_status() == RUNTIME_WORK_QUEUE_PAUSED || _control_agent.get_status() == RUNTIME_WORK_QUEUE_STOPPED) {
255 }
256
259
261 return false;
262 }
263
264 // break on execution failure.
265 if (context->execute() == false) {
266 failed = true;
267 break;
268 }
269
270 }
271
272 _queue.reset();
273
274 if (failed == true) {
276 return false;
277 }
278
280
281 return true;
282 }
runtime_work_queue_status get_status()
Definition: System.hpp:222
bool completed()
Definition: System.hpp:200
std::shared_ptr< WorkContext > pop()
Definition: System.hpp:233
@ RUNTIME_WORK_QUEUE_CANCELLED
Definition: System.hpp:69
References _control_agent, _paused, _queue, Horizon::System::RuntimeContext::WorkControlAgent::completed(), Horizon::System::RuntimeContext::WorkControlAgent::failed(), Horizon::System::RuntimeContext::WorkControlAgent::get_status(), pop(), Horizon::System::RUNTIME_WORK_QUEUE_CANCELLED, Horizon::System::RUNTIME_WORK_QUEUE_PAUSED, and Horizon::System::RUNTIME_WORK_QUEUE_STOPPED.
Referenced by Horizon::System::RuntimeContext::run().
Here is the call graph for this function: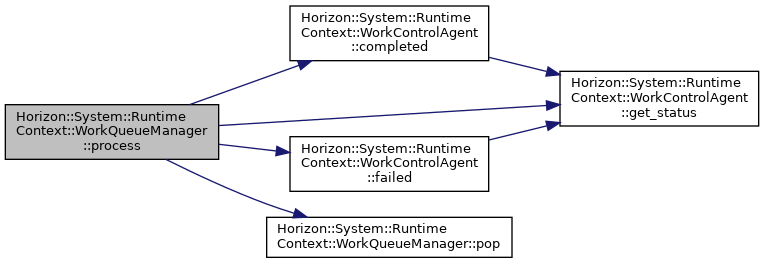 Here is the caller graph for this function:
Here is the caller graph for this function:
◆ push()
|
inline |
232{ _queue.push(std::move(seg)); }
References _queue.
Referenced by Horizon::System::RuntimeContext::push().
Here is the caller graph for this function:
Member Data Documentation
◆ _control_agent
| WorkControlAgent& Horizon::System::RuntimeContext::WorkQueueManager::_control_agent |
Referenced by process().
◆ _paused
| std::atomic<bool> Horizon::System::RuntimeContext::WorkQueueManager::_paused {false} |
Referenced by is_paused(), and process().
◆ _queue
| boost::lockfree::spsc_queue<std::shared_ptr<WorkContext>, boost::lockfree::capacity<100> > Horizon::System::RuntimeContext::WorkQueueManager::_queue |
The documentation for this class was generated from the following file:
- src/Server/Common/System.hpp