44{
45 sol::usertype<GridCoords> config_1 = state->new_usertype<
GridCoords>(
"GridCoords", sol::constructors<GridCoords(uint16_t, uint16_t)>());
50
51
52 sol::usertype<MapCoords> config_2 = state->new_usertype<
MapCoords>(
"MapCoords",
53 sol::constructors<MapCoords(uint16_t, uint16_t)>());
58
59 sol::usertype<Map> config_3 = state->new_usertype<
Map>(
"Map");
66 config_3[
"add_new_item_drop"] = sol::resolve<void(int, MapCoords, int, int)>(&
Map::add_item_drop);
68}
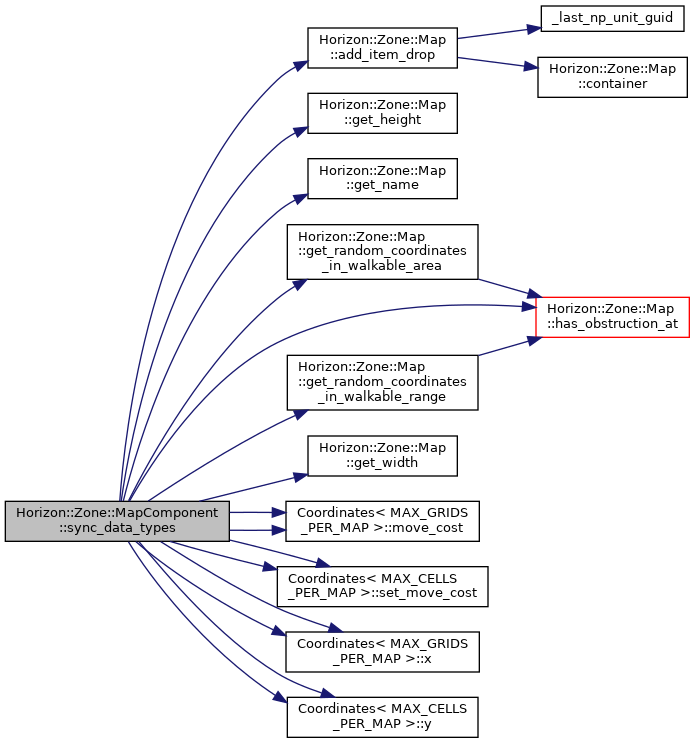
int16_t y() const
Definition: Coordinates.hpp:120
int16_t move_cost() const
Definition: Coordinates.hpp:121
int16_t x() const
Definition: Coordinates.hpp:119
void set_move_cost(int16_t move_cost)
Definition: Coordinates.hpp:122
The class Map is the representation of a map in the game. It contains all the cells and the grid hold...
Definition: Map.hpp:62
void add_item_drop(int item_id, MapCoords map_coords, int amount, int identified)
Definition: Map.cpp:95
std::string const & get_name()
Definition: Map.hpp:69
uint16_t get_width()
Definition: Map.hpp:73
bool has_obstruction_at(int16_t x, int16_t y)
Definition: Map.cpp:67
MapCoords get_random_coordinates_in_walkable_area(uint16_t x, uint16_t y, int16_t xs, int16_t ys)
Definition: Map.hpp:130
uint16_t get_height()
Definition: Map.hpp:74
MapCoords get_random_coordinates_in_walkable_range(uint16_t x, uint16_t y, int16_t min, int16_t max)
Definition: Map.hpp:109
 Inheritance diagram for Horizon::Zone::MapComponent:
Inheritance diagram for Horizon::Zone::MapComponent: