The class Map is the representation of a map in the game. It contains all the cells and the grid holder. It also contains the A* pathfinder. It is the main class for the map. It is used to get the cells, the grid holder and the pathfinder, and perform a variety of operations on them. More...
#include <Map.hpp>
 Inheritance diagram for Horizon::Zone::Map:
Inheritance diagram for Horizon::Zone::Map: Collaboration diagram for Horizon::Zone::Map:
Collaboration diagram for Horizon::Zone::Map: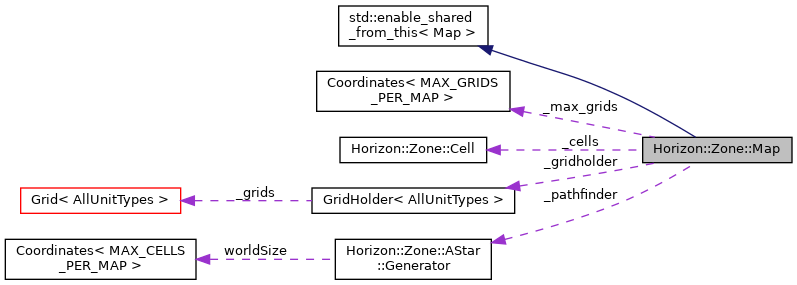
Public Member Functions | |
| Map (std::weak_ptr< GameLogicProcess >, std::string const &, uint16_t, uint16_t, std::vector< uint8_t > const &) | |
| ~Map () | |
| std::shared_ptr< GameLogicProcess > | container () |
| std::string const & | get_name () |
| int | get_area () |
| uint16_t | get_width () |
| uint16_t | get_height () |
| map_cell_types | get_cell_type (MapCoords coords) |
| GridHolderType & | getGridHolder () |
| template<class T > | |
| bool | ensure_grid_for_unit (T *unit, MapCoords coords) |
| template<class T , class CONTAINER > | |
| void | visit (int grid_x, int grid_y, GridReferenceContainerVisitor< T, CONTAINER > &visitor) |
| template<class T , class CONTAINER > | |
| void | visit (GridCoords const &lower_bound, GridCoords const &upper_bound, GridReferenceContainerVisitor< T, CONTAINER > &visitor) |
| template<class T , class CONTAINER > | |
| void | visit_in_range (MapCoords const &map_coords, GridReferenceContainerVisitor< T, CONTAINER > &visitor, uint16_t range=MAX_VIEW_RANGE) |
| AStar::Generator & | get_pathfinder () |
| bool | has_obstruction_at (int16_t x, int16_t y) |
| MapCoords | get_random_accessible_coordinates () |
| MapCoords | get_random_coordinates_in_walkable_range (uint16_t x, uint16_t y, int16_t min, int16_t max) |
| MapCoords | get_random_coordinates_in_walkable_area (uint16_t x, uint16_t y, int16_t xs, int16_t ys) |
| void | set_user_count (int32_t count) |
| int32_t | get_user_count () |
| void | add_user_count () |
| void | sub_user_count () |
| void | add_item_drop (int item_id, MapCoords map_coords, int amount, int identified) |
| void | add_item_drop (std::shared_ptr< item_entry_data > entry, int32_t amount, MapCoords map_coords) |
Private Attributes | |
| std::weak_ptr< GameLogicProcess > | _container |
| std::string | _name {""} |
| uint16_t | _width {0} |
| uint16_t | _height {0} |
| GridCoords | _max_grids |
| Cell | _cells [MAX_CELLS_PER_MAP][MAX_CELLS_PER_MAP] {{0}} |
| GridHolderType | _gridholder |
| AStar::Generator | _pathfinder |
| int32_t | _user_count { 0 } |
Detailed Description
The class Map is the representation of a map in the game. It contains all the cells and the grid holder. It also contains the A* pathfinder. It is the main class for the map. It is used to get the cells, the grid holder and the pathfinder, and perform a variety of operations on them.
- Parameters
-
_container The container that contains this map. _name The name of the map. _width The width of the map. _height The height of the map. _cells The cells of the map. _gridholder The grid holder of the map. _pathfinder The A* pathfinder of the map. _obstructions The obstructions of the map.
Constructor & Destructor Documentation
◆ Map()
| Map::Map | ( | std::weak_ptr< GameLogicProcess > | container, |
| std::string const & | name, | ||
| uint16_t | width, | ||
| uint16_t | height, | ||
| std::vector< uint8_t > const & | cells | ||
| ) |
References _cells.
◆ ~Map()
| Map::~Map | ( | ) |
References _cells, _height, _width, and Horizon::Zone::Cell::~Cell().
Here is the call graph for this function:
Member Function Documentation
◆ add_item_drop() [1/2]
| void Map::add_item_drop | ( | int | item_id, |
| MapCoords | map_coords, | ||
| int | amount, | ||
| int | identified | ||
| ) |
References _last_np_unit_guid(), s_grid_notify_item_drop_entry::amount, container(), s_grid_notify_item_drop_entry::drop_effect_mode, s_grid_notify_item_drop_entry::guid, HLog, s_grid_notify_item_drop_entry::is_identified, s_grid_notify_item_drop_entry::item_id, ItemDB, RESOURCE_PRIORITY_TERTIARY, s_grid_notify_item_drop_entry::show_drop_effect, sZone, s_grid_notify_item_drop_entry::type, UNIT_ITEM, s_grid_notify_item_drop_entry::x, s_grid_notify_item_drop_entry::x_area, s_grid_notify_item_drop_entry::y, and s_grid_notify_item_drop_entry::y_area.
Referenced by Horizon::Zone::MapComponent::sync_data_types().
Here is the call graph for this function: Here is the caller graph for this function:
Here is the caller graph for this function:
◆ add_item_drop() [2/2]
| void Map::add_item_drop | ( | std::shared_ptr< item_entry_data > | entry, |
| int32_t | amount, | ||
| MapCoords | map_coords | ||
| ) |
References _last_np_unit_guid(), s_grid_notify_item_drop_entry::amount, container(), s_grid_notify_item_drop_entry::drop_effect_mode, s_grid_notify_item_drop_entry::guid, s_grid_notify_item_drop_entry::is_identified, s_grid_notify_item_drop_entry::item_id, RESOURCE_PRIORITY_TERTIARY, s_grid_notify_item_drop_entry::show_drop_effect, sZone, s_grid_notify_item_drop_entry::type, UNIT_ITEM, s_grid_notify_item_drop_entry::x, s_grid_notify_item_drop_entry::x_area, s_grid_notify_item_drop_entry::y, and s_grid_notify_item_drop_entry::y_area.
Here is the call graph for this function:
◆ add_user_count()
| void Map::add_user_count | ( | ) |
References _user_count, container(), get_name(), get_user_count(), and HLog.
Here is the call graph for this function: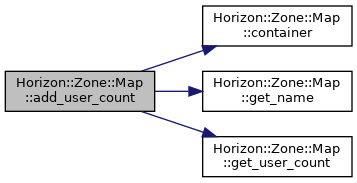
◆ container()
|
inline |
References _container.
Referenced by add_item_drop(), add_user_count(), and sub_user_count().
Here is the caller graph for this function: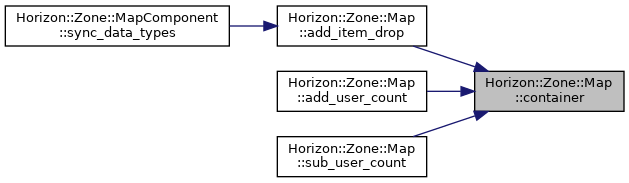
◆ ensure_grid_for_unit()
| bool Horizon::Zone::Map::ensure_grid_for_unit | ( | T * | unit, |
| MapCoords | coords | ||
| ) |
References _gridholder, GridHolder< ZONE_OBJECT_TYPES >::get_grid(), get_name(), MAX_CELLS_PER_GRID, MAX_GRIDS_PER_MAP, Coordinates< MAX_COORDINATES >::scale(), Coordinates< MAX_COORDINATES >::x(), and Coordinates< MAX_COORDINATES >::y().
Here is the call graph for this function: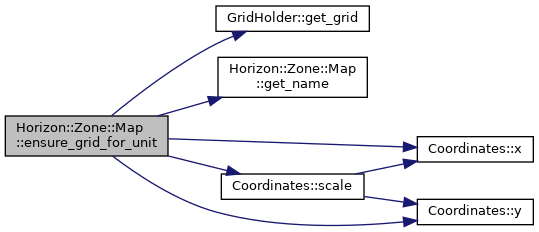
◆ get_area()
|
inline |
◆ get_cell_type()
|
inline |
References _cells, Horizon::Zone::Cell::get_type(), Coordinates< MAX_COORDINATES >::x(), and Coordinates< MAX_COORDINATES >::y().
Here is the call graph for this function: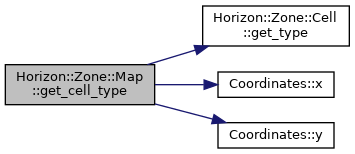
◆ get_height()
|
inline |
References _height.
Referenced by Horizon::Zone::MapComponent::sync_data_types().
Here is the caller graph for this function:
◆ get_name()
|
inline |
References _name.
Referenced by add_user_count(), ensure_grid_for_unit(), sub_user_count(), and Horizon::Zone::MapComponent::sync_data_types().
Here is the caller graph for this function: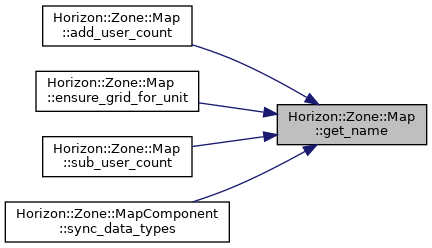
◆ get_pathfinder()
|
inline |
References _pathfinder.
◆ get_random_accessible_coordinates()
|
inline |
References _height, _width, and has_obstruction_at().
Here is the call graph for this function:
◆ get_random_coordinates_in_walkable_area()
|
inline |
References _height, _width, and has_obstruction_at().
Referenced by Horizon::Zone::MapComponent::sync_data_types().
Here is the call graph for this function: Here is the caller graph for this function:
Here is the caller graph for this function:
◆ get_random_coordinates_in_walkable_range()
|
inline |
References has_obstruction_at().
Referenced by Horizon::Zone::MapComponent::sync_data_types().
Here is the call graph for this function: Here is the caller graph for this function:
Here is the caller graph for this function:
◆ get_user_count()
|
inline |
References _user_count.
Referenced by add_user_count(), and sub_user_count().
Here is the caller graph for this function: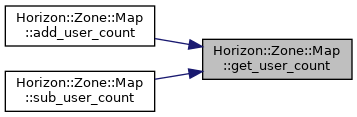
◆ get_width()
|
inline |
References _width.
Referenced by Horizon::Zone::MapComponent::sync_data_types().
Here is the caller graph for this function:
◆ getGridHolder()
|
inline |
References _gridholder.
◆ has_obstruction_at()
| bool Map::has_obstruction_at | ( | int16_t | x, |
| int16_t | y | ||
| ) |
References _cells, _height, _width, and Horizon::Zone::Cell::isWalkable().
Referenced by get_random_accessible_coordinates(), get_random_coordinates_in_walkable_area(), get_random_coordinates_in_walkable_range(), and Horizon::Zone::MapComponent::sync_data_types().
Here is the call graph for this function: Here is the caller graph for this function:
Here is the caller graph for this function: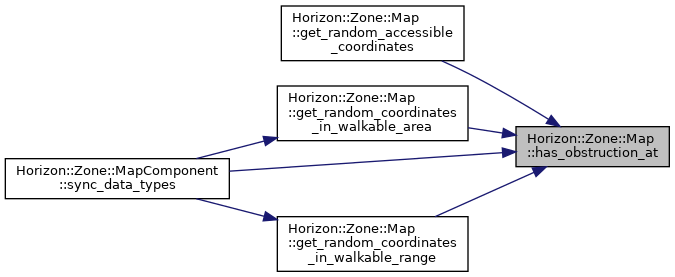
◆ set_user_count()
|
inline |
References _user_count, and GridTypeListIterator::count().
Here is the call graph for this function:
◆ sub_user_count()
| void Map::sub_user_count | ( | ) |
References _user_count, container(), get_name(), get_user_count(), and HLog.
Here is the call graph for this function: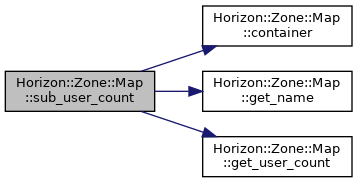
◆ visit() [1/2]
|
inline |
References Coordinates< MAX_COORDINATES >::x(), and Coordinates< MAX_COORDINATES >::y().
Here is the call graph for this function:
◆ visit() [2/2]
|
inline |
References Grid< GRID_OBJECT_TYPES >::visit().
Here is the call graph for this function:
◆ visit_in_range()
|
inline |
References Coordinates< MAX_COORDINATES >::at_range(), MAX_CELLS_PER_GRID, MAX_CELLS_PER_MAP, MAX_GRIDS_PER_MAP, and Coordinates< MAX_COORDINATES >::scale().
Here is the call graph for this function:
Member Data Documentation
◆ _cells
|
private |
Referenced by get_cell_type(), has_obstruction_at(), Map(), and ~Map().
◆ _container
|
private |
Referenced by container().
◆ _gridholder
|
private |
Referenced by ensure_grid_for_unit(), and getGridHolder().
◆ _height
|
private |
◆ _max_grids
|
private |
◆ _name
|
private |
Referenced by get_name().
◆ _pathfinder
|
private |
Referenced by get_pathfinder().
◆ _user_count
|
private |
Referenced by add_user_count(), get_user_count(), set_user_count(), and sub_user_count().
◆ _width
|
private |
The documentation for this class was generated from the following files: